

Using an earlier lane departure warning system (LDWS) that employs standard GPS data rather than expensive cameras or maps, Minnesota researchers have enhanced and refined the system, moving closer to an affordable product to warn drivers about dangerous lane drift and approaching curves.
According to the American Association of State Highway and Transportation Officials (AASHTO), drivers who unintentionally drift off the roadway or into another lane cause almost 60% of fatal accidents on major roadways. A 2018 study reported that lane departure crashes are the greatest contributor to traffic fatalities in the U.S.
“As an emergent technology that builds on existing infrastructure, this in-vehicle lane departure warning system creates real opportunity to assist drivers in staying within their lane,” said Victor Lund, traffic engineer, St. Louis County.
In-vehicle lane departure warning systems (LDWS) can reduce all crash severities, including an 86% reduction in fatalities. To achieve its Toward Zero Deaths goal, MnDOT needs to develop LDWS that are inexpensive and available to all drivers.
A previous MnDOT and Local Road Research Board (LRRB) research project produced a smartphone-based LDWS that showed great potential toward meeting cost and availability criteria. The incidence of occasional false positives (the system alarm activating when no lane departure had occurred) required further investigation and modification of the system. MnDOT and LRRB wanted researchers to resolve the false positive anomaly and to further develop the in-vehicle LDWS.
What Was Our Goal?
The goal of this project was to refine the in-vehicle LDWS that had been developed in Phase I of the research. The primary objectives were to address and resolve occurrences of false positives—warnings where no lane deviation had occurred—and to further develop the system to possible commercial implementation.
What Did We Do?
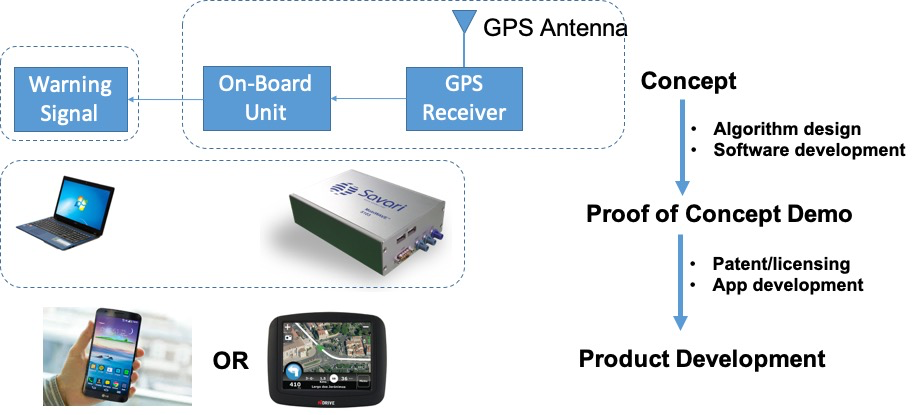
To estimate a vehicle’s lateral shift with respect to its heading on the road (known as the road reference heading, or RRH), many currently available LDWS rely on cameras that detect pavement markings to determine lane position. However, markings can degrade and in inclement weather, stripes and other markings can be obscured. Camera-based systems may also add GPS technology while other types use high-resolution digital maps and advanced GPS technology. These systems can be extremely accurate, but are also expensive and are generally used in luxury vehicles.
Researchers were intent upon using data sources that were both widely available and inexpensive to determine a vehicle’s lateral shift. They initially developed a system algorithm that utilized open-source digital maps and standard GPS information.
In road testing, the first system functioned very well, successfully issuing audio warnings for every one of approximately 200 lane changes made during the test on various parts of the road, including curves. However, the system issued false positives on approximately 10% of the trial runs, warning of a lane deviation when none had occurred. An examination of the possible cause of these erroneous warnings revealed that the open-source low-resolution digital maps contained an inherent lateral error that was more pronounced on curved sections of roadway. The slightly compromised maps informed the LDWS that the vehicle was deviating from the curved road when in fact it was not.
“Without using cameras or high-resolution digital maps, this system’s novel algorithm can accurately detect drivers’ unintentional lane departures and sound a timely warning. Encouraging results have paved the way toward its possible integration into popular smartphone apps, such as Google Maps or Waze,” said Imran Hayee, professor, University of Minnesota Duluth Department of Electrical Engineering .
To avoid using low-resolution maps for the RRH to estimate the vehicle’s lateral shift, researchers developed an enhanced LDWS that extracted an RRH for a given road from the position data of the vehicle’s past trips on the same road. They devised a novel algorithm that successfully generated an accurate RRH from the vehicle’s past trajectories. This reduced the incidence of false alarms to essentially zero. The system functions if the vehicle has already traveled the road once. But the first time the vehicle travels a road, this aspect of the system will not function. To address that problem, researchers developed an alternate method of determining RRH through vehicle-to-vehicle (V2V) communication with other cars on the same road.
What Was the Result?
In multiple field tests of the system with its new algorithm, more than 100 lane changes were accurately detected in a timely manner. No false alarms were observed. Road tests evaluating the V2V handshake protocol showed that the new LDWS in the vehicle receiving RRH data from a nearby vehicle was able to detect lane departures accurately. The project successfully developed an in-vehicle LDWS using standard GPS technology. Further, researchers also devised a V2V communication protocol with direct short-range communication to acquire RRH from another vehicle, if needed.
What’s Next?
A patent application has been filed, and Phase III, the implementation stage, has already been approved. During this phase, researchers plan to develop a smartphone app as a marketable end product. Possible future inclusion of the app in Google Maps, Waze or similar systems would allow use of vast existing road data from users.
